|
|
Į©┴óū°ś╦(bi©Īo)ŽĄŻ║Į©┴óęįÖC(j©®)Ų„╚╦Äū║╬ųąą─×ķįŁ³c(di©Żn)Ą─CENTERū°ś╦(bi©Īo)ŽĄŻ¼ÖC(j©®)Ų„╚╦Ū░Ž“▀\(y©┤n)äė(d©░ng)ĘĮŽ“?y©żn)ķx▌Sš²ĘĮŽ“Ż©╝t╔½╝²Ņ^Ż®Ż¼┼cų«┤╣ų▒Ž“ū¾×ķy▌Sš²ĘĮŽ“Ż©ŠG╔½╝²Ņ^Ż®Ż¼z▌S┤╣ų▒ė┌╝ł├µŽ“═ŌŻ¼ØMūŃėę╩ųČ©ätĪŻ
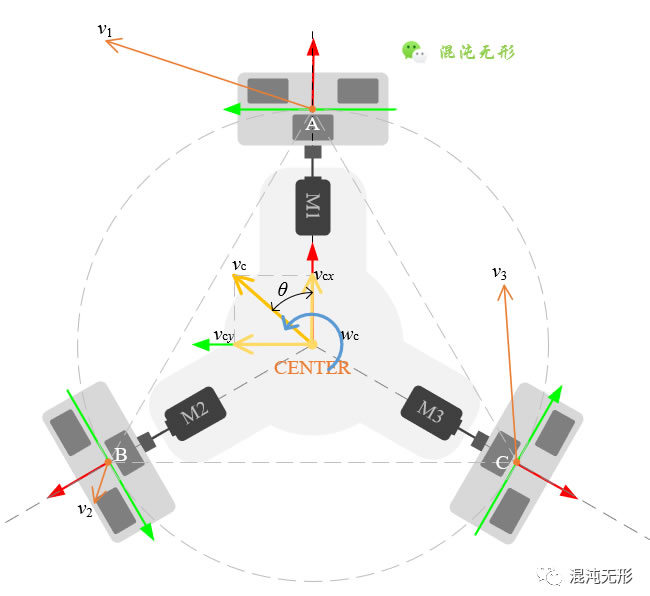
╚²▌å╚½Ž“▌åęŲäė(d©░ng)ŲĮ┼_(t©ói)ū°ś╦(bi©Īo)ŽĄ╩ŠęŌłD. ³c(di©Żn)ABCĘųäe▒Ē╩Š╚½Ž“▌å┼cĄž├µĄ─Įėė|³c(di©Żn). ╚½Ž“▌åęŲäė(d©░ng)ŲĮ┼_(t©ói)ī┘ė┌╚½Ž“ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦ĘČ«ĀĄ─įŁę“╩Ūėą╚²éĆ(g©©)ūįė╔Č╚Ż¼ęŌ╬Čų°┐╔ęįį┌ŲĮ├µā╚(n©©i)ū÷│÷╚╬ęŌĘĮŽ“ŲĮęŲ═¼Ģr(sh©¬)ūįą²Ą─äė(d©░ng)ū„Ż¼╚ńłD 2.1╦∙╩ŠŻ¼▓╔ė├╚╬ęŌĘĮŽ“Ą─ŠĆ╦┘Č╚╝░ĮŪ╦┘Č╚[vc wc]TüĒ├Ķ╩÷CENTERĄ─╦┘Č╚Ż¼Č°vc┐╔čžų°ū°ś╦(bi©Īo)▌SĘųĮŌ×ķā╔éĆ(g©©)Ęų╦┘Č╚Ż¼▒Ē╩Š×ķ[vcx vcy wc]TĪŻ ŲõŠĆ╦┘Č╚[vcx vcy]TĘĮŽ“?y©żn)ķčžų°ū°ś?bi©Īo)▌Sš²ĘĮŽ“ät×ķš²Ż¼Ę┤ĘĮŽ“?y©żn)ķž?f©┤)Ż╗Č°ÖC(j©®)Ų„╚╦─µĢr(sh©¬)ßśą²▐D(zhu©Żn)Ą─Ģr(sh©¬)║“Ż¼ĮŪ╦┘Č╚wc×ķš²Ż¼Ę┤ų«×ķžō(f©┤)ĪŻŻ©Č©┴xĘĮ╩Į┼cĪČā╔▌å▓Ņ╦┘“ī(q©▒)äė(d©░ng)ÖC(j©®)Ų„╚╦▀\(y©┤n)äė(d©░ng)─Żą═╝░æ¬(y©®ng)ė├Ęų╬÷ĪĘųąĄ─ŽÓ╦ŲŻ®
|
| ░µÖÓ(qu©ón)╦∙ėą © ▒▒Š®äō(chu©żng)Ø╔ųŪ╗█ÖC(j©®)Ų„╚╦┐Ų╝╝ėąŽ▐╣½╦Š ĄžųĘŻ║▒▒Š® ŪÕ╚A┐Ų╝╝ł@Cū∙╬ÕśŪ ļŖįÆŻ║4006-937-088 Š®ICPéõ20010582╠¢(h©żo)-2 |